知覚・認知の視点から運動をひも解く 樋口貴広(知覚運動制御研究室)
研究内容research
知覚・認知の視点から運動をひも解く

適応的歩行調整(Adaptive locomotor Adjustment)
歩く・走るなどの移動行動(locomotion)は,周期的な運動です。しかしその周期性は,同じ動きを繰り返すことで生み出されるのではなく,状況に応じて動きを調節することで実現されます。状況に応じた調整を,適応的な移動行動の調整(Adaptive locomotor adjustment)といいます。
私たちの研究室では,こうした調整作用に対する知覚・認知機能の役割を明らかにすることを目指しています。得られた成果を,高齢者の転倒予防や,効果的なリハビリテーションの提案,スポーツ選手のサポートに生かすのが目標です。
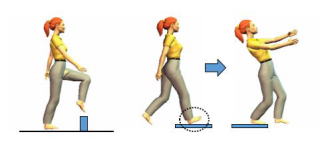
図1 適応的な移動行動の調整(ALA)の事例。図に示したような大きな変化以外だけでなく,速度や進行方向の微調整といった,わずかな変化もALAに含まれる。
先読みする力:予期的制御
研究室では特に,視覚情報を利用して状況を先読みし,予期的に移動行動を調整する力の解明に力を注いでいます。自分自身が常に移動しながら,その周期性やバランスを保つには,遠くの状況を把握し,状況の変化に対していち早く備えておくのが有効です。視覚は遠くの情報を効率よく,かつ正確に得るための絶対的な情報です。従って,視覚を遠方の知覚に効果的に利用できれば,安定して予期的制御を行うことができます。
ここで問題となるのが,視覚は遠方の知覚だけに利用されるわけではない,ということです。足元の状況把握や身体情報の知覚,道具操作などにも利用されます。こうした知覚に対する視覚の役割が大きくなると,予期的制御に視覚を利用することができません。私たちはこうした問題意識のもと,予期的制御のために視覚を効果的に利用するために必要な条件を見いだす研究も行っています。
予期的制御に関する研究事例をレビューした論文(2013年発表)について,「Frontiers in Psychology」より無料でダウンロードできます。この論文は,「Frontiers in Psychology」誌に掲載された論文のうち,閲覧された論文の上位10%にランクされました(2019年9月19日現在)
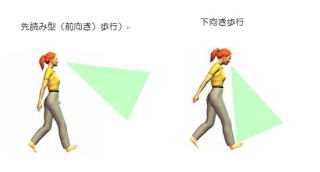
図2 予期的制御をスムーズに行うためには,視線を前向きにして,遠方の状況を視覚的に得ることが有用である
実験心理学,動作解析,バーチャルリアリティ
私の専門は実験心理学です。実験心理学では,直接眼には見えない知覚・認知・運動に関わるプロセスについて,入力(どのような刺激や教示を与えるか)と出力(どのような反応や解答が得られたか)の関係に基づき推察をしていく学問です。研究室では,この実験心理学のパラダイムを,移動行動の理解に活用しています。
動きの詳細な記述のために三次元動作解析を利用していることや,刺激の提示にバーチャルリアリティを用いていることを特徴としています。バーチャルリアリティ環境におけるトレーニングによって衝突回避能力を向上させる試みについては,科学研究費補助金(基盤研究S,研究代表者:積山薫,京都大学)によるサポートを得ています。
バーチャルリアリティを用いた研究事例はこちらをご覧ください。

主な装置
| 三次元動作解析装置(Qualysis社製 OQUS) |
| 可搬型フォースプレート(Kisler社製) |
| |
| バーチャルリアリティシステム&三次元動作解析装置 (ソリッドレイ社製 Omega Space, OptiTrack社製 Flex 13,) |
| |
多様な研究テーマ
研究室では,歩行以外にも様々なテーマを扱っています。その中には,大学院生が自ら持ち込んで行ってきたテーマもあります。様々なテーマに共通しているのは,「知覚・認知」と「身体・運動」の互恵的な関係に着目しているということです。すなわち,身体運動を実現するための知覚・認知の機能に着目することや,知覚・認知に対する身体運動の役割を明らかにすること(いわゆる身体性認知)が共通しています。
現在,特に力を入れている研究は以下の通りです。
・子供の不器用さの理解に関する認知科学的研究
(鹿屋体育大学・中本浩揮先生,一橋大学・北洋輔先生との共同研究)
・スポーツ初心者の予測力向上に関する研究
(研究室助教・福原和伸先生との共同研究)
大学院修了生の研究テーマ一覧はこちらをご覧ください